


 1
1 2
2 1
1


从现在知道的信息来看,应该还是ARM架构,除了ARM也没什么适合移动端的新架构。

 登录|注册
登录|注册






GPS导航、WiFi定位的原理是通过几个固定参照物来计算当前位置,那是否可以在家中给扫地/擦地机器人新的参照物,实现机器人空间定位呢?答案当然是可以的,iRobot Braava320/380擦地机器人的NorthStar北极星导航系统就是这样做的。

NorthStar北极星导航系统由NorthStar导航盒与擦地机器人上传感器组成,置于高处导航盒会不停发射定位的光信号,光信号利用天花板反射可以覆盖数十平方米空间,机器人在接收到信号之后结合自身传感器获知的速度、角度数据,即可计算出机器人相对位置,这样就能避免重复清洁,假若需要进一步扩大清洁范围,可以加入更多NorthStat导航盒。

NorthStar北极星导航能获得精度的相对位置,可导航盒会增加额外的成本,而且清洁范围越大需要部署的导航盒越多,所以在iRobot在最新的扫地机器人Roomba 980采用的是基于视觉定位技术,Dyson 360 Eye也是一样。

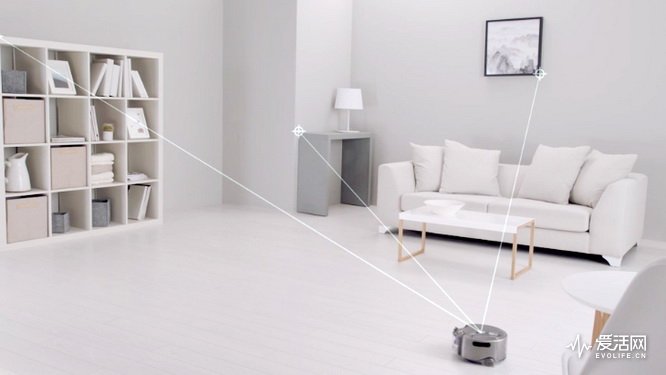
假若你走出陆家嘴地铁站,你不懂得看太阳位置判断方位之术,手中更无导航设备、指南针,但只要告诉你东方明珠、上海中心、正大广场分别在陆家嘴站的西北、东南、西南方向,就可以根据上北下南左西右东原则以及目视判断方向,甚至是计算出行走距离。

视觉导航技术原理与此相似,以Dyson 360 Eye为例,它顶部有一个摄像头,工作前先拍摄周边环境,创建一张360°全景图,并从中选择三个参照物。在机器启动后,摄像头以秒30帧的速度不停拍摄周边环境,把新拍摄的图像与360°全景图中的参照物作比较,就可以知道机器运动方向、距离了,完成导航。
扫地/擦地机器人导航技术众多,优劣更难一概而论,只有合适的技术用在合适的产品之上,更可况影响机器人清洁表现不只有导航,它是选购产品一个参考点不是全部。
要发表评论,您必须先登录。



视觉要是环境光线不足会导致什么结果