

 1
1 1
1 1
1


从现在知道的信息来看,应该还是ARM架构,除了ARM也没什么适合移动端的新架构。

 登录|注册
登录|注册






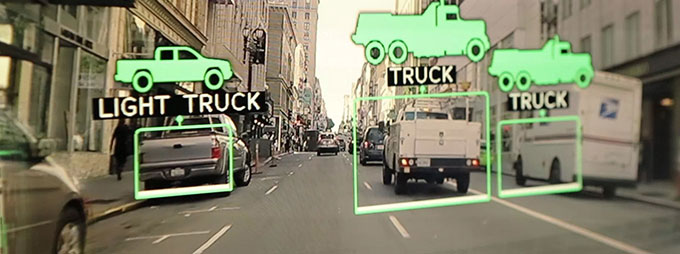
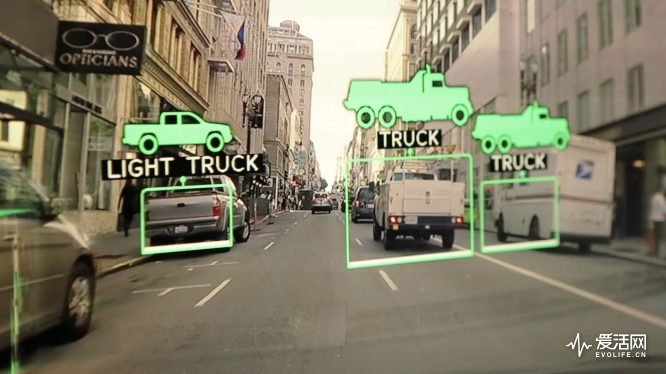
回到一开头看到看妹的例子,遇到路边正在行走的妹子,传感器捕捉之后形成一套数据,更具体一些,传感器本身并不知道它捕捉到了了什么,它们只是众多关联节点中的一个,任务就是把外部信息收取下来,上传到车辆的内部网络中。
系统的控制单元则不需要关心每个传感器抓到了什么,它会在内部信息网络中抓住相关的主题,比如从一大堆数据中抽象出行人、路牌、GPS、地图甚至地标等等。随后发出相关指令,并最终记录在册。
为了防止数据冲突,任务的执行是线性的。比如在完成右拐之前,系统会询问上一个左拐任务有没有完成。记录在册的原因则是方便工程师对自动驾驶系统判断是否准确进行分析。事实证明,把问题交给GPU和神经网络并不能解决所有问题,但仍然是提升效率的捷径方案。
拥有模拟现实的数据就能不断验证车载电脑中新算法的可行性,这就意味着工程师不一定要开着车不断在路上行驶,同样一套数据可以放在电脑里,让AI或者工程师不断尝试,因此更多IT公司不需要参与汽车设计,就能在办公室里找到更优秀的解决方案。
获得了解决方案后,系统最终会对踏板、转向系统、油门发出指令。世面常见的汽车电瓶最多能提供12V的电压,前面提到的Core i7外加NVIDIA TITAN X根本不可能运行,因此测试厂商会先将电池电压通过逆变器转换成110V。同样控制转向、踏板的电机则会被设计12V电压下运行的执行单元。
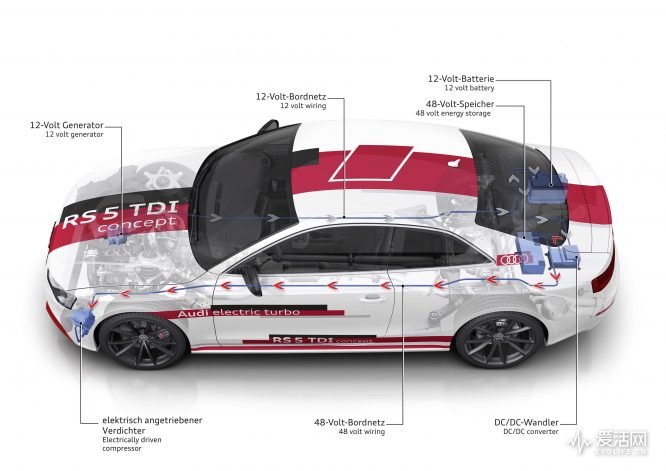
自动驾驶的设计小组最常遇到的问题是,车辆ECU在车辆停止运行30分钟内关闭发动机点火,依靠蓄电池仅存的电量给自动驾驶系统设备供电非常不现实,不用半天只找充电宝给蓄电池充电。所以无论是修改什么量产车作为自动驾驶的实测工具,都会通过修改车辆本身的控制模块来获得理想的实验环境。

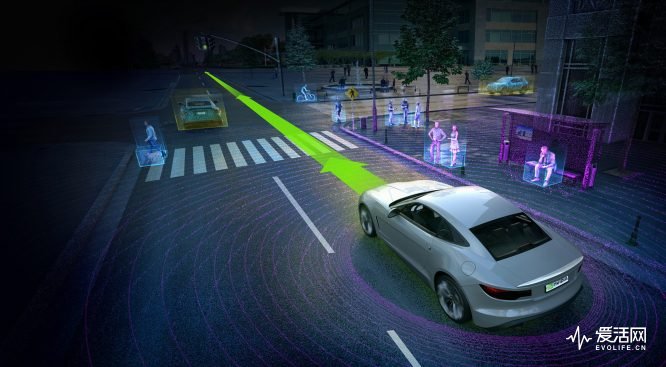
自动驾驶需要依赖的环境有时候也不局限于车内,更高阶的自动驾驶还会考虑车与车之间的位置、行驶速度、距离,以及车与环境之间的交流,比如下一个拐角的红绿灯、车辆拥堵状况。自动驾驶系统最终会成长为一个庞大且复杂的网络,更重要的是,它会在我们向妹子吹口哨之前,完成感知、规划并作出行动。能让一个复杂系统短时间内作出判断非常不容易,而这也是工程师日常中最头痛的问题之一。

要发表评论,您必须先登录。



中间gif哈哈哈哈哈